

INTRODUCTION
I have been offering follicular unit excision (FUE) to my patients for the past 8 years. During this time, I have used several FUE devices but the extraction of healthy, chubby grafts has always been one of my challenges. Two years ago, I was introduced to Trivellini’s Mamba device at the Latin-American FUE workshop and it has changed my practice. Excision of the grafts is no longer the most challenging portion of the procedure and my graft quality has improved as my overall procedure time has decreased.
Challenges of Graft Excision
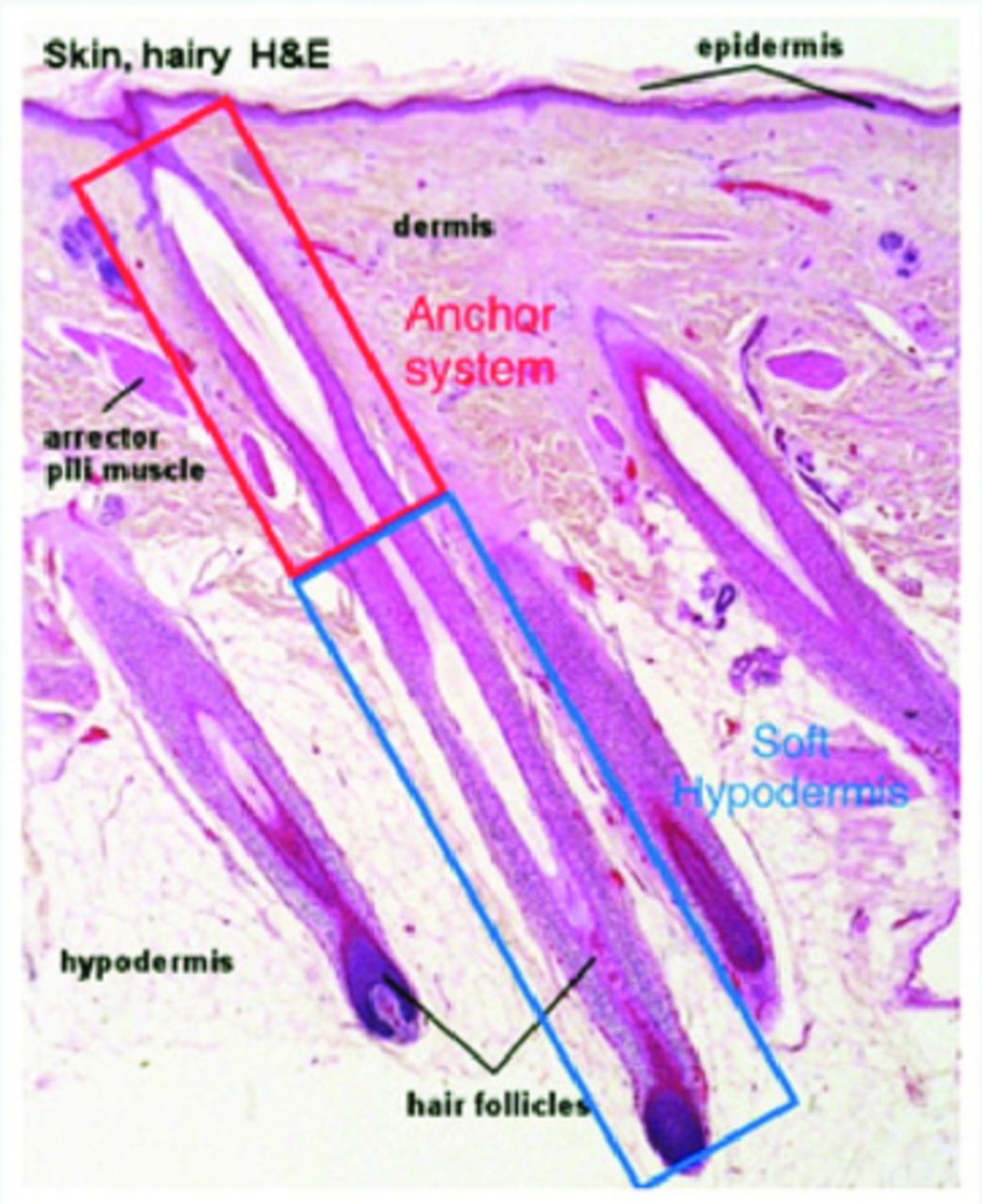
FUE is not always easy and requires a great deal of hand–eye coordination. The thickness and resistance of the skin is not the same between patients. The skin has two distinct layers affecting the forces involved with the FUE extraction (Figure 1):
A firm layer consisting of epithelium and superficial dermis. This layer is also called anchor system and is responsible for most of the attachment of follicular units to the skin.
A soft layer below the epidermis consisting of the hypodermis, fat tissue, and areolar space. The anchor system also resides in the dermis. This layer requires less force to cut when dissecting the follicular units.

It is important to determine the depth needed in order to dissect the anchor system and partially liberate the graft. The deeper you cut, the more fat you can expect around the deeper aspect of the graft, but there is also a higher risk of transecting the hair shaft when the punch goes deeper.
The ideal type of excision for any follicular unit should be a very sharp cut only for the initial incision in the firm epidermis. This should be followed by a soft dissection for the dermis (to a determined depth) to cut the anchor system and to include fat around the dermal papilla. You should be able to excise and extract a complete healthy graft with enough surrounding tissue to protect the follicles and ensure maximum yield after placement. The ideal FUE device should have different phases to accommodate the differences in resistance among the layers of the skin with which we deal when performing FUE.
Common Problems with FUE
Some of the most common problems related to a variety of FUE devices or methods include transection, slow extraction, user dependability, and buried grafts. There are a variety of punches with differences in their sharpness, forms, diameters, and sizes. To correct for some of the noted problems, FUE device manufacturers addressed the following areas:
Rotation. Cuts the tissue quicker and speeds up the procedure; the sharp edge of the punch causes a higher rate of transection, torque can cause rotational damage.
Oscillation. Minimizes the sharp transection of grafts by minimizing the rotating incision; this method can slow down the procedure since oscillation is not the easiest method to use to cut through tough portions of skin.
Vibration. Minimizes the cutting force and reduces the rate of transection; vibration has a very slow cutting effect and it can prolong the procedure time.
Each of these methods is designed to either speed up the process or reduce the transection rate. However, none alone has been able to produce a high-quality graft with minimal transection at a high speed.
My experience with a sharp punch, either oscillating or rotating, is that it helps cut the superficial and deep layers quickly and is easier and faster. But as the punch goes deeper at the same speed, there is a much higher risk of transection. Unlike a sharp punch, a dull punch can reduce the transection rate but it takes longer to cut the superficial, tougher portion of the skin. This means better-quality grafts at the cost of significantly slowing the speed of the procedure. Using a blunt punch also can increase the rate of buried grafts.
The Trumpet, Hybrid, or Flat sharp punches were good solutions that I could use with minimal transection. The Trumpet punch was much more forgiving when I could not follow the main axis of the follicular unit or when there was a higher transection rate due to a high splay rate. But it slowed my excision rate and increased the number of buried grafts. With the Flat punch, I experienced a lower transection rate but the excision rate was significantly slower.
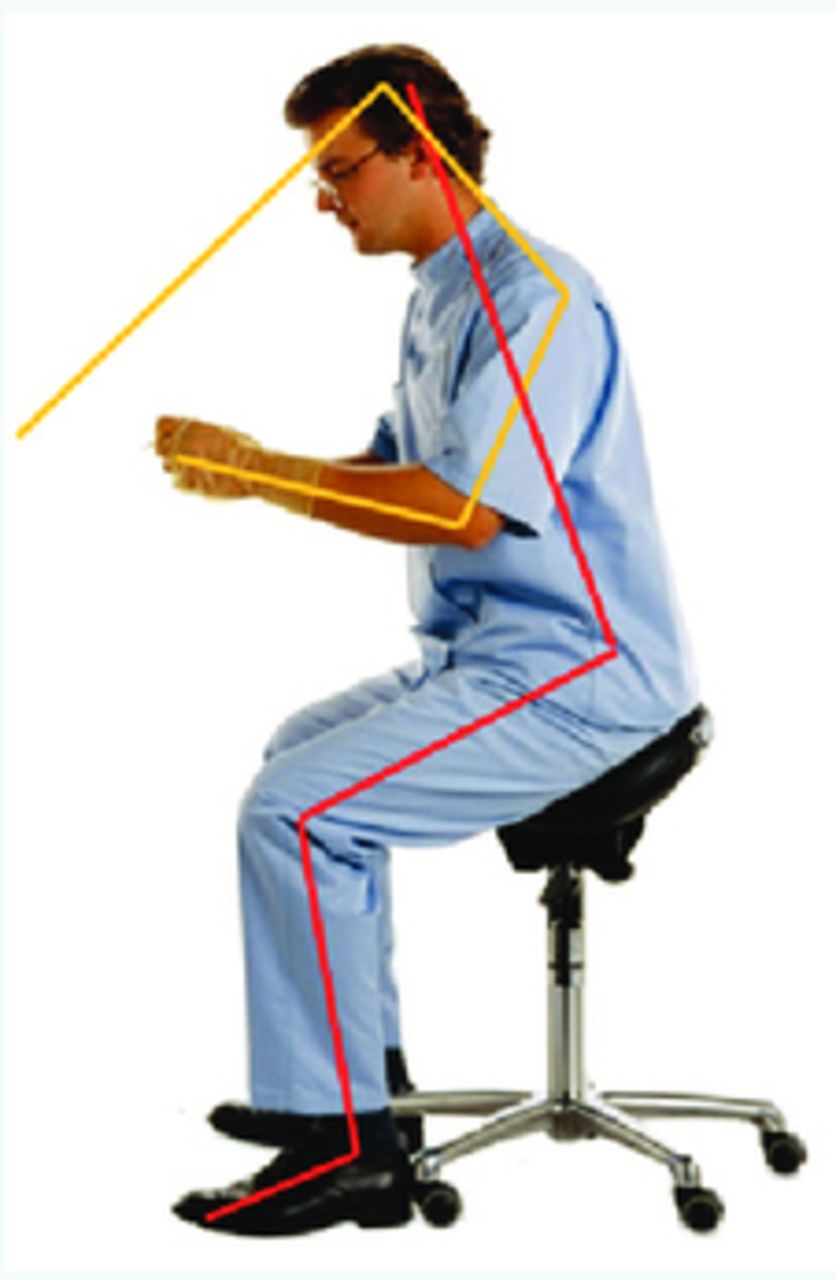
Another challenge I faced was coordinating my eye, foot, and hand movements. I had to properly center the punch on the targeted graft and press the foot pedal when I had a certain force applied over the follicular unit. It took me awhile to get that right, and since I always had to keep one foot on the pedal, my movement and positioning around the patient’s head was limited (Figure 2).

Pedal-dependent devices require eye-foot-hand coordination. The pauses among different stages, in addition to the latency period to coordinate eye, then foot, followed by hand movements, increases the overall time for each excision. It may seem like it only takes seconds to coordinate but, when you add these movements, it can significantly add to the procedure time.
MULTIPHASIC EXCISION
The Trivellini Device
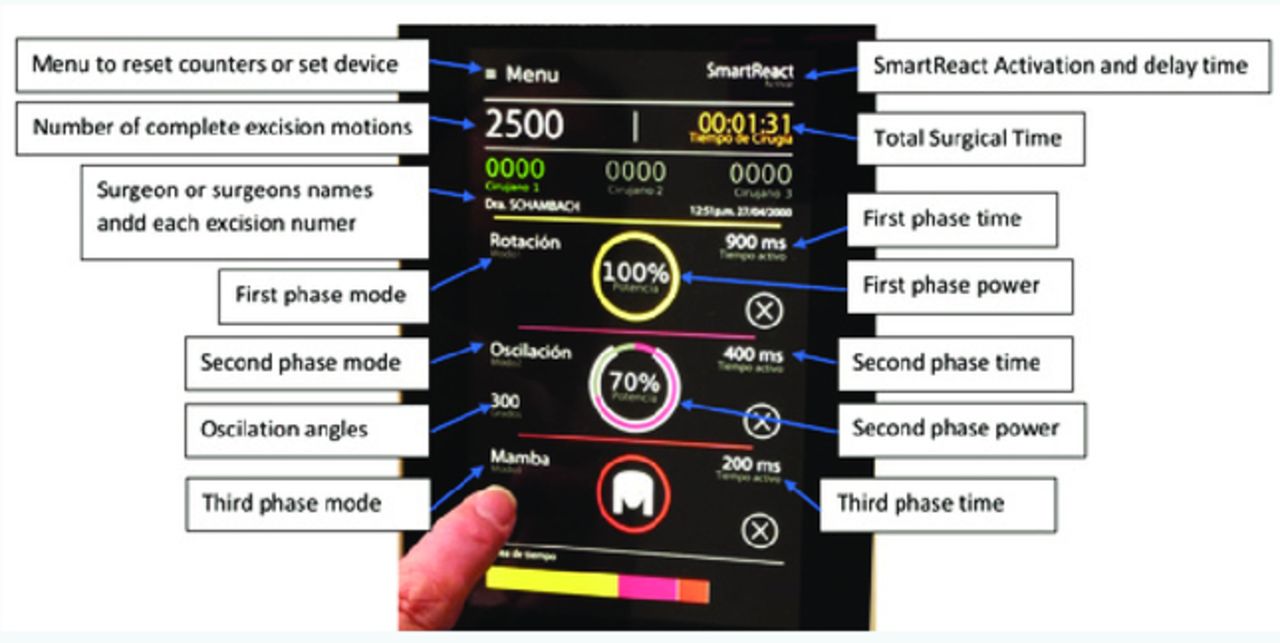
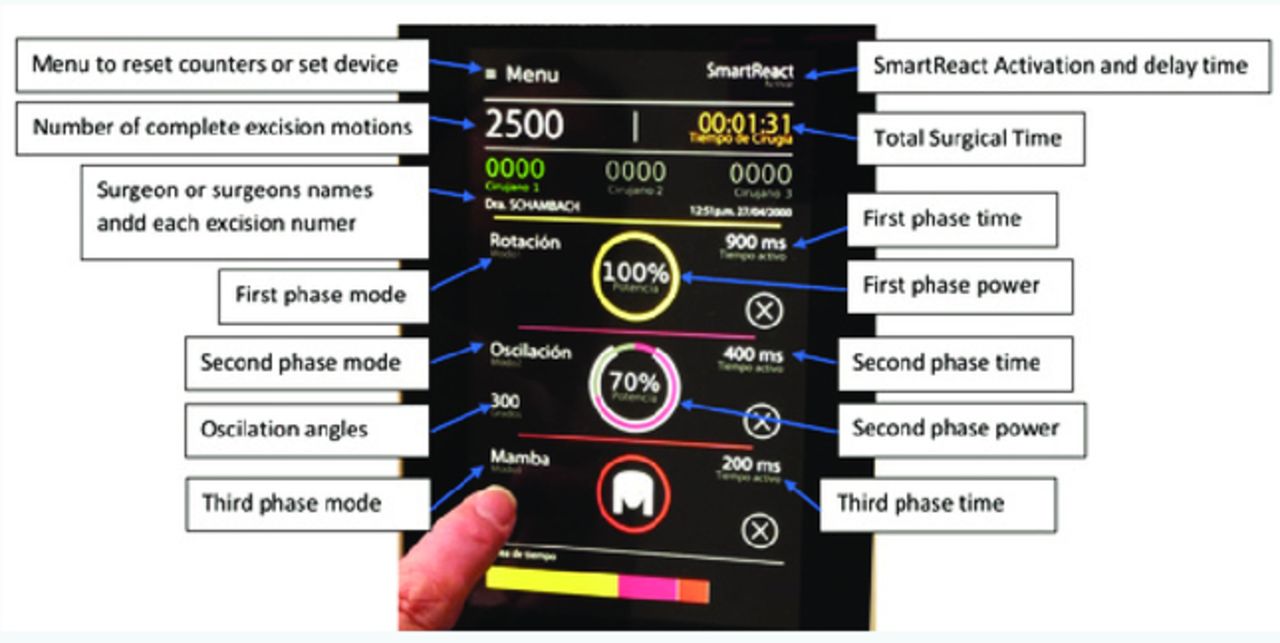
I found the solution in the Trivellini Device where a multiphasic system exists using different modes, strengths, and durations that can be set for different phases of graft excision based on tissue resistance (epithelium, superficial dermis, deep dermis, and fat). This system allows for the following choices (Figure 3):
Modes (types of motion): oscillation, rotation, vibration, and Mamba mode
Power: 10%-100%
Time (for each phase): 100-800msec
I set the mode for each stage of the follicular unit excision along with the power and time. Since each patient has unique skin and hair characteristics, we can adjust precisely how long it takes to cut through the superficial layer with a preset strength and mode. The initial stage will be automatically and seamlessly followed by the second and third stages with different speeds and forces to dissect smoothly through the lower skin layers while protecting the hair follicles. This increases our efficiency.
If rotation is used for a patient who has a tight, thick superficial layer, we either use a more powerful rotation and/or a longer rotation time than we would for a patient who has thin, fragile skin.
If the superficial layer is unusually thin and soft, we can change to the oscillation mode instead of rotation. The speed of each stage determines when the first phase is over. If the initial step is set to 200msec, once we reach the dermis after 200msec, the rapid rotation stops and we can modify the motion and the speed for a gentler dissection through the dermis to minimize the risk of trauma to the grafts. I often switch from rotation to oscillation for the softer dermal layer that offers less resistance. The device seamlessly switches from one mode to the other as it traverses the skin layers.
The most common parameters I use are 200msec of rotation at 60% speed followed by 300msec of Mamba movement (which is an asynchronic roto-oscillation). Nevertheless, I change time frames, speeds, and forces depending on the type of skin, the caliber of the hair, and the depth of the anchoring system. Other parameters I love using include 100msec rotation at 100% power followed by 300msec of oscillation at 120 degrees and 30% power. I always spend 30 minutes choosing the ideal sequence for the ideal graft and procuring a higher hair/graft coefficient.
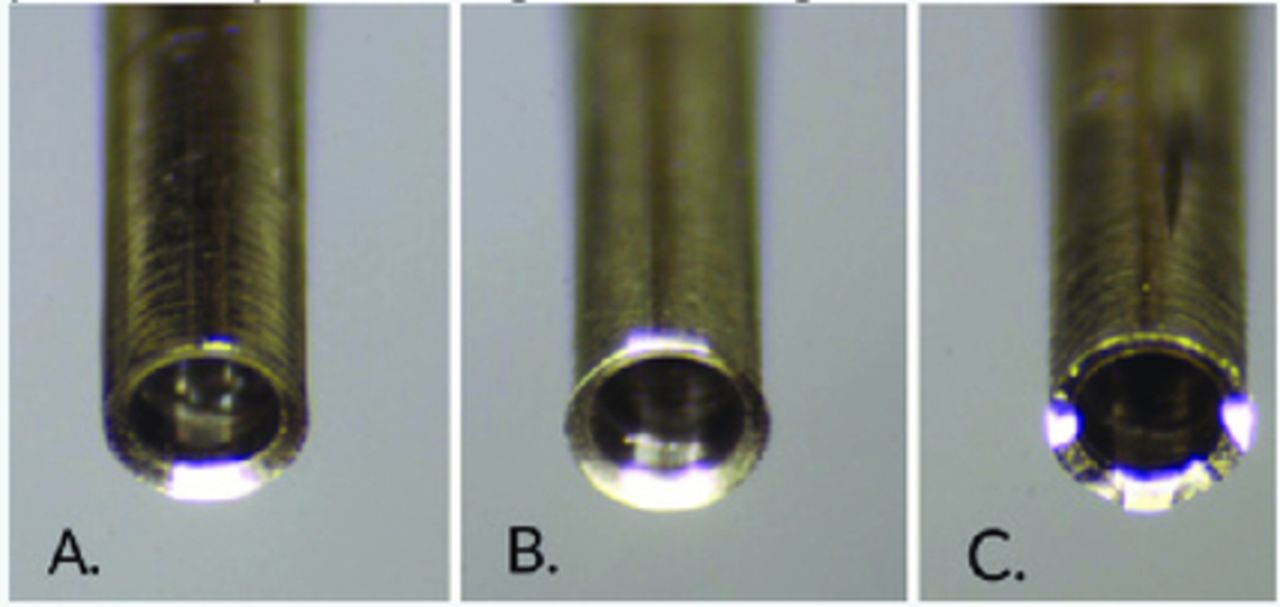
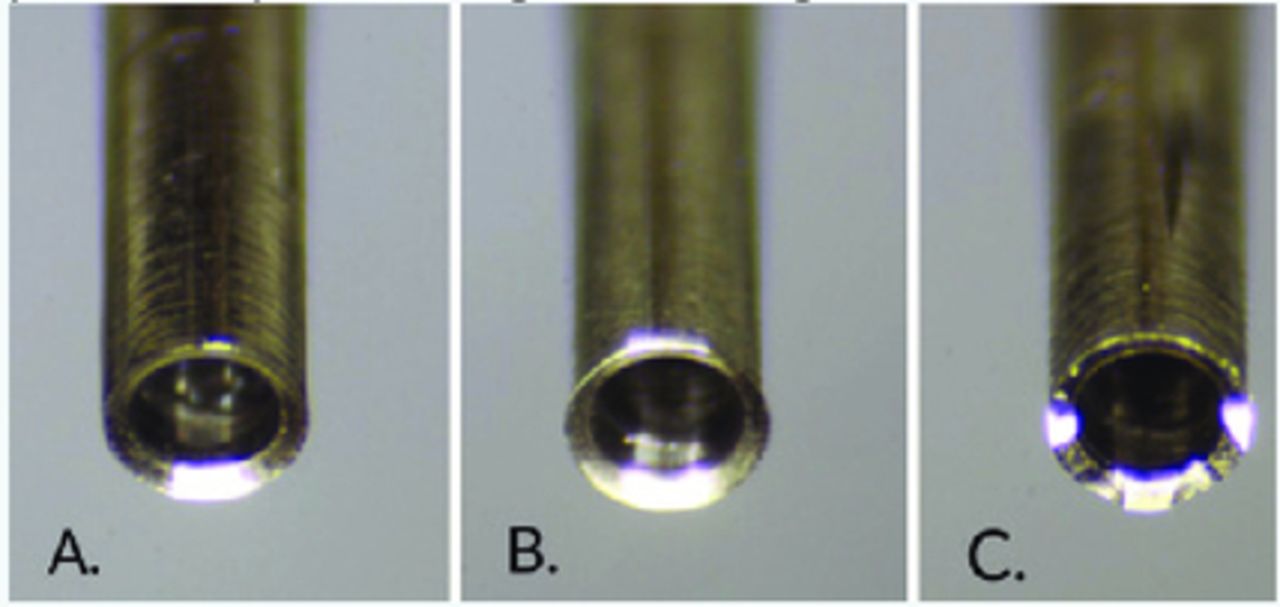
Punches included
The device provides three types of punches: a sharp edged-out punch, a flared sharp punch, and a punch designed for long hair (Figure 4). These punches are made of a high-quality and strong material, allowing you to use one punch for several surgeries, and also come in different sizes ranging from 0.8 to 0.05 with differences between each. The sharp edged-out punch has the cutting edge on the outer part of the bevel to protect the graft inside the punch. The flared punch has the cutting edge also facing outward to protect the graft, but also creates a difference in pressure that helps the graft into the punch’s lumen. The long hair punch has half of the perimeter as the edge-out punch and the other half has blunt irregularities to capture the hair shaft during the excision without cutting it, therefore being able to excise long hair follicular units.
Suction assisted
The device is equipped with soft suction that ensures that the punch is stabilized on the skin precisely while keeping the tip of the punch tightly on the epidermis around the target. This eliminates the need to have traction on the skin that most other devices are dependent on. It also eliminates the need for tumescence. Thus, suction greatly reduces the risk of burying the grafts or sliding through the skin and damaging surrounding tissue. The time consumed by cleaning blood from the surgical field is also reduced by aspirating the blood in the area and this also increases visibility.
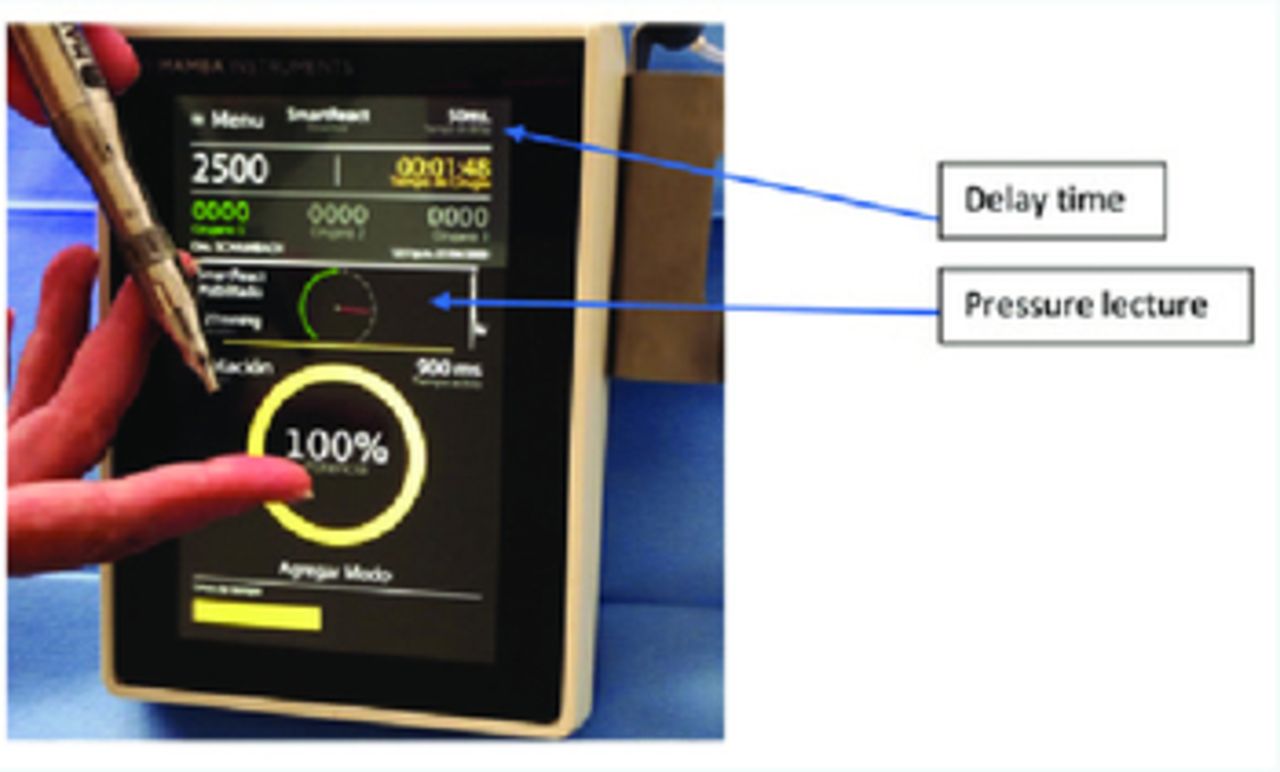
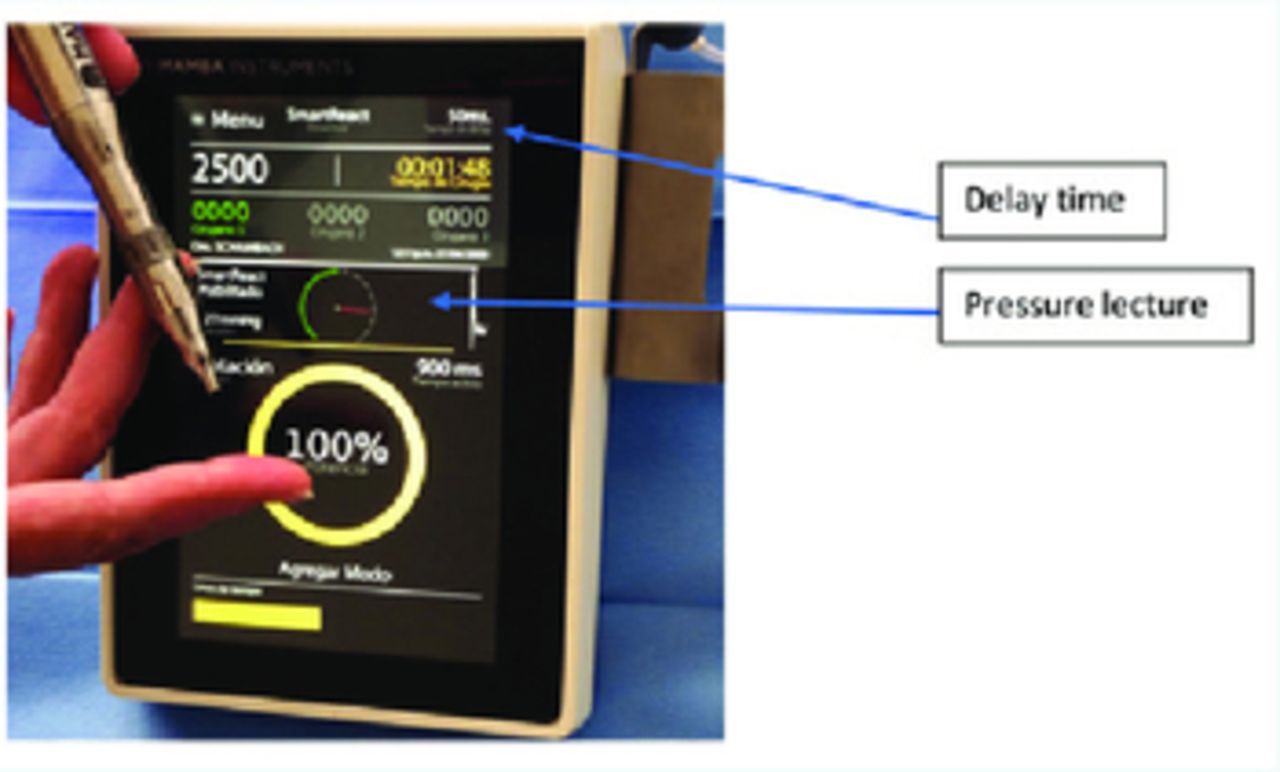
Smart React
The suction builds negative pressure within the system as soon as the tip of the punch is placed over the targeted graft. The Smart React System senses the drop in pressure and automatically starts the punch motion for each circular excision (Figure 5). The Smart React eliminates the need for a pedal, which saves a few seconds during each excision cycle. This helps maintain the efficiency of the FUE process throughout the procedure.
HOW IT WORKS
The Trivellini System is an FUE device that can be programmed for different modes of action, power, and duration for each phase of extraction. It is assisted by suction (negative pressure to hold and stabilize the skin) that helps start each cycle automatically after the punch touches the skin when using the Smart React option. The operators who might need more time to center the punch over the grafts may program a delay in initiation of the Smart React mechanism, so they can have time to properly position the punch over the follicular units.
ADVANTAGES
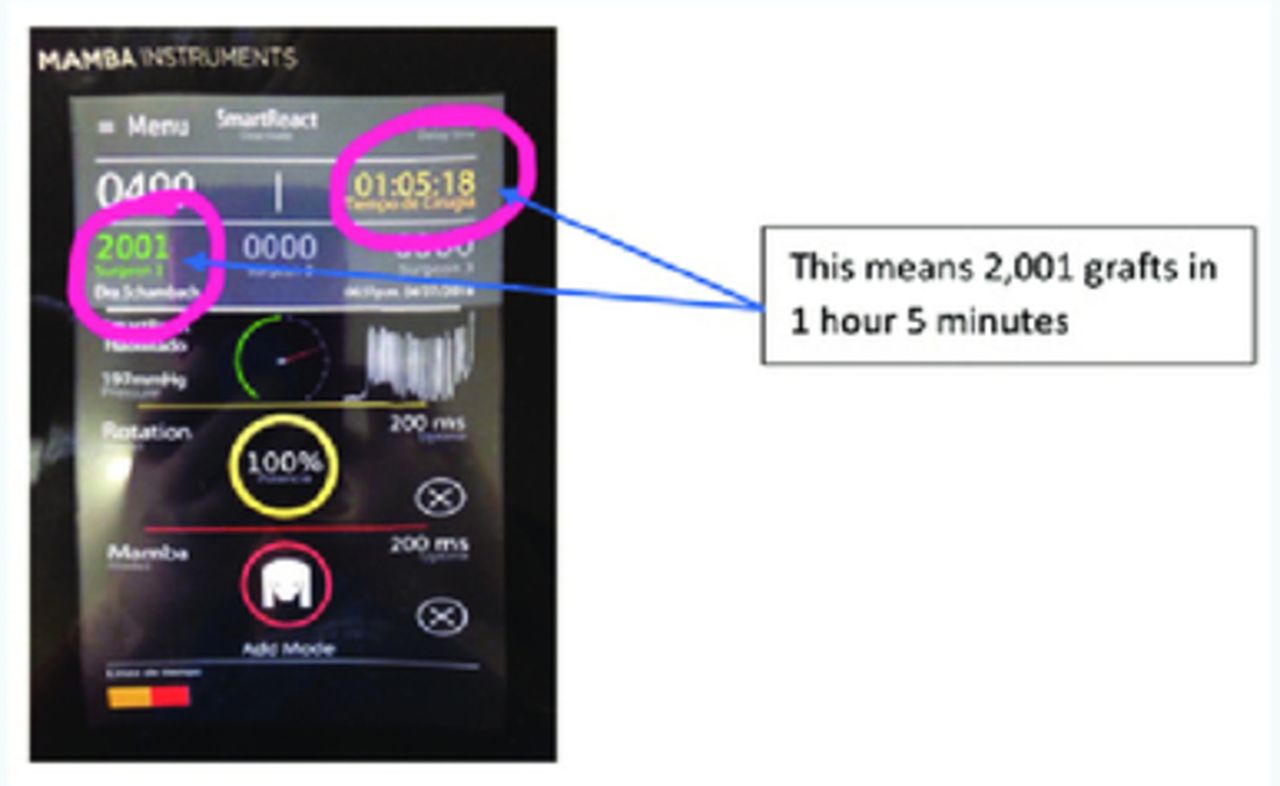
Speed
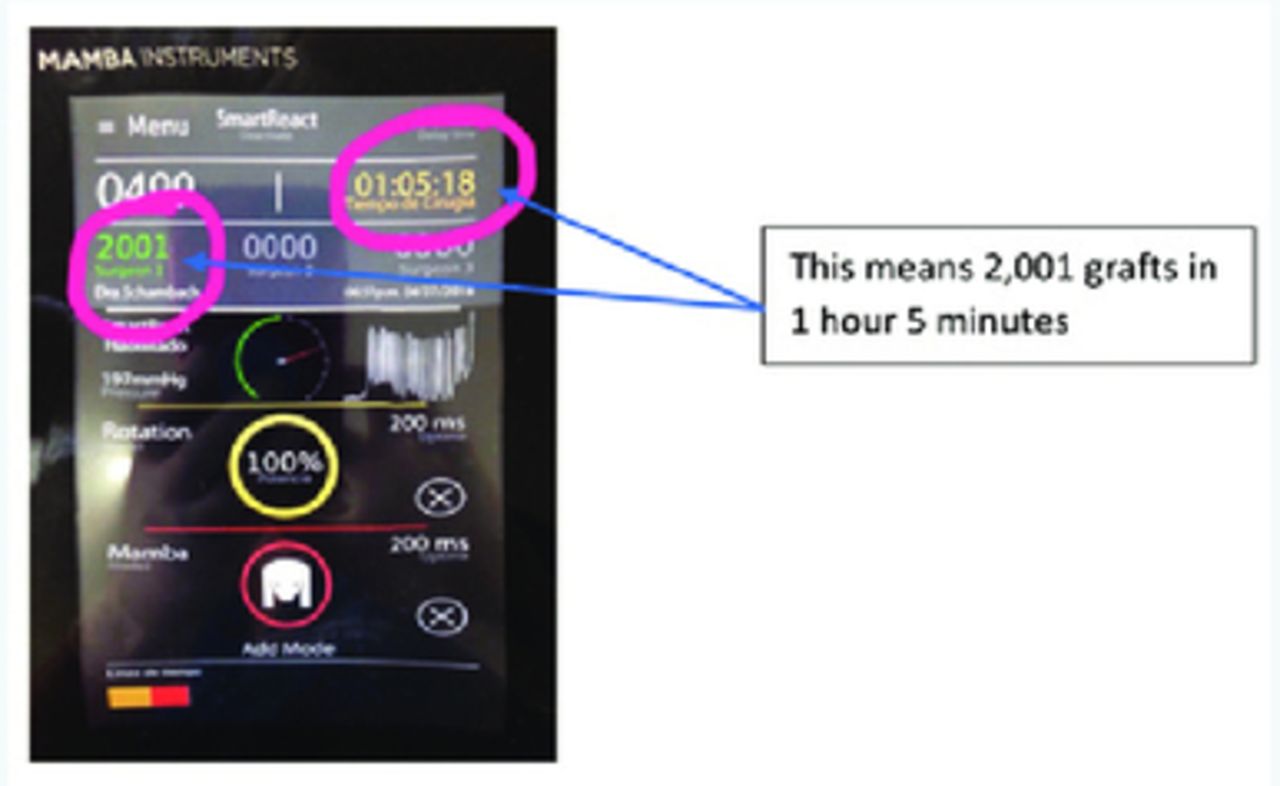
Since I started using the Trivellini with Smart React, I have cut my excision time in half due to the ability to find the perfect excision phase (on average 300-400msec per excision cycle) and the 50msec of delay in automatic start without using the pedal. (See Figure 6.)
Graft quality
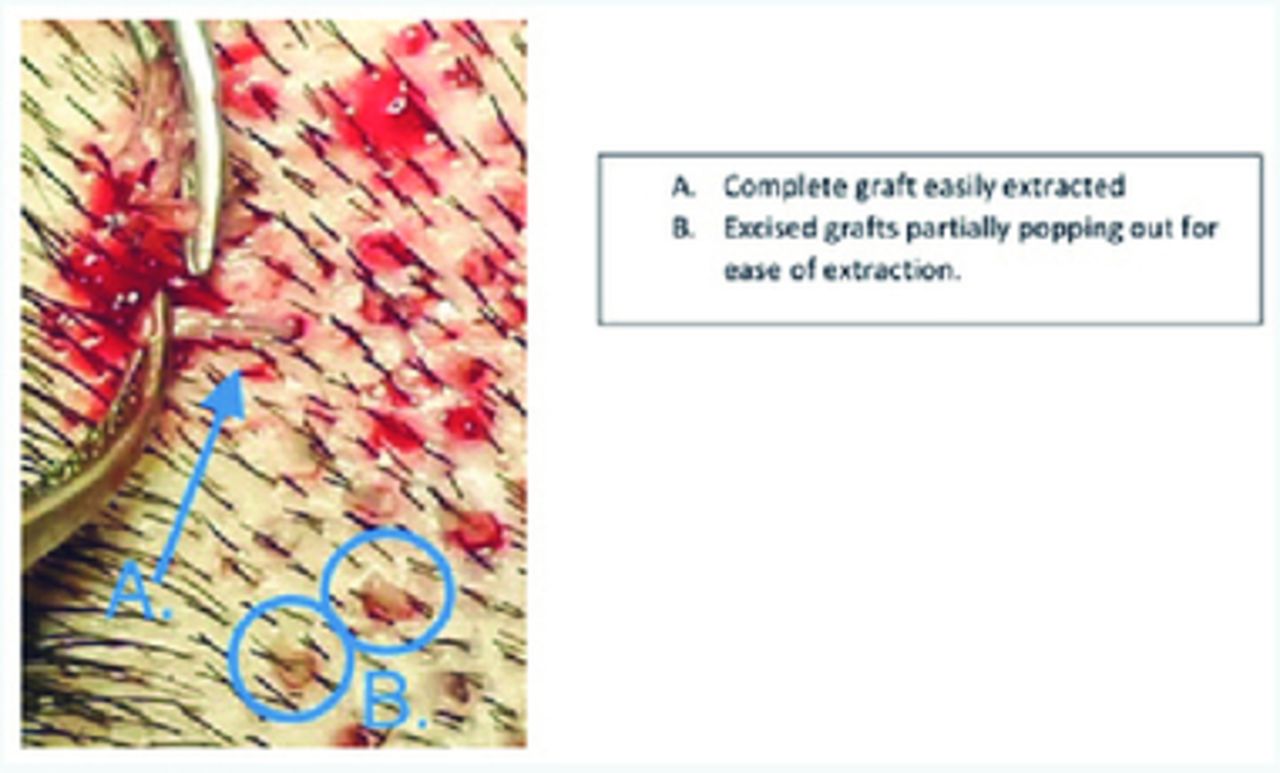
Despite reducing my graft harvesting time, my graft quality has improved. The excising punch can travel deeper into the skin without the risk of burying or transecting the grafts while the grafts are almost completely loose allowing the technicians to remove them easily and effortlessly (Figure 7).

Patient comfort
Reducing the time of the procedure means I don’t have to stay in a fixed position for a very long time. This also makes it easier for the patient to better tolerate the FUE portion of the procedure. Decreasing procedure time and improving graft quality improves our patient satisfaction. Since I am not dependent on the pedal for the extraction of each graft, I can be more mobile around the patient’s head and minimize the straining that I used to have with the fixed positions I had to maintain when using pedal-controlled devices (Figure 8).

SUMMARY
My overall hair transplantation time has decreased significantly while the level of patient satisfaction has increased. I can harvest more grafts or simply reduce the overall procedure time if I choose. The Trivellini multiphasic FUE excision system has a very short learning curve; I achieved my current speed a few weeks after I started using it. In addition to improving the quality of the grafts through its multiphasic mechanism, the readily available grafts minimize the trauma that technicians apply to the grafts while pulling them forcefully from the skin. The system is very easy to set up. The operator can easily change the modes, power, and time of each phase depending on the type of skin and hair with which they are working. Improving the ergonomics of the procedure is achieved by cutting down the excision time and keeping the operator more mobile and less dependent on a fixed position that has to do with the use of a pedal in other types of FUE devices.
- Copyright © 2018 by The International Society of Hair Restoration Surgery
In this issue





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Jump to section
Related Articles
Cited By...
- No citing articles found.